Att upprätthålla din integritet är viktigt för oss. Av denna anledning har vi tagit fram en integritetspolicy som beskriver hur vi använder och lagrar din information. Läs igenom vår sekretesspraxis och låt oss veta om du har några frågor.
Insamling och användning av personlig information
Med personuppgifter avses uppgifter som kan användas för att identifiera eller kontakta en specifik person.
Du kan bli ombedd att lämna din personliga information när som helst när du kontaktar oss.
Nedan finns några exempel på de typer av personlig information vi kan samla in och hur vi kan använda sådan information.
Vilken personlig information samlar vi in:
- När du skickar in en ansökan på webbplatsen kan vi samla in olika uppgifter, inklusive ditt namn, telefonnummer, adress E-post etc.
Hur vi använder din personliga information:
- Samlas av oss personlig information tillåter oss att kontakta dig och informera dig om unika erbjudanden, kampanjer och andra evenemang och kommande evenemang.
- Från tid till annan kan vi använda din personliga information för att skicka viktiga meddelanden och kommunikationer.
- Vi kan också använda personlig information för interna ändamål såsom revision, dataanalys och olika studier för att förbättra de tjänster vi tillhandahåller och förse dig med rekommendationer angående våra tjänster.
- Om du deltar i en prisdragning, tävling eller liknande kampanj kan vi använda informationen du tillhandahåller för att administrera sådana program.
Utlämnande av information till tredje part
Vi lämnar inte ut informationen från dig till tredje part.
Undantag:
- Om nödvändigt - i enlighet med lag, rättsligt förfarande, i rättsliga förfaranden och/eller på grundval av offentliga förfrågningar eller förfrågningar från statliga organ i Ryska federationen - att avslöja din personliga information. Vi kan också komma att avslöja information om dig om vi fastställer att ett sådant avslöjande är nödvändigt eller lämpligt för säkerhets-, brottsbekämpande eller andra offentliga ändamål.
- I händelse av en omorganisation, sammanslagning eller försäljning kan vi komma att överföra den personliga information vi samlar in till tillämplig efterträdande tredje part.
Skydd av personlig information
Vi vidtar försiktighetsåtgärder - inklusive administrativa, tekniska och fysiska - för att skydda din personliga information från förlust, stöld och missbruk, såväl som obehörig åtkomst, avslöjande, ändring och förstörelse.
Respektera din integritet på företagsnivå
För att säkerställa att din personliga information är säker kommunicerar vi sekretess- och säkerhetsstandarder till våra anställda och tillämpar strikt sekretesspraxis.
Var x* - en av lösningarna till det inhomogena systemet (2) (till exempel (4)), (E−A+A) bildar kärnan (nollutrymme) i matrisen A.
Låt oss göra en skelettnedbrytning av matrisen (E−A+A):
E−A + A=Q·S
Var Q n×n−r- rangmatris (Q)=n−r, S n−r×n-rangmatris (S)=n−r.
Då kan (13) skrivas i följande form:
x=x*+Q·k, ∀ k ∈ Rn-r.
Var k=Sz.
Så, förfarande för att hitta en allmän lösning system linjära ekvationer att använda en pseudoinvers matris kan representeras i följande form:
- Beräkna pseudo invers matris A + .
- Vi beräknar en speciell lösning till det inhomogena systemet av linjära ekvationer (2): x*=A + b.
- Vi kontrollerar systemets kompatibilitet. För att göra detta, beräknar vi A.A. + b. Om A.A. + b≠b, då är systemet inkonsekvent. Annars fortsätter vi proceduren.
- Låt oss ta reda på det E−A+A.
- Gör skelettnedbrytning E−A + A=Q·S.
- Att bygga en lösning
x=x*+Q·k, ∀ k ∈ Rn-r.
Lösa ett system av linjära ekvationer online
Online-kalkylatorn låter dig hitta den allmänna lösningen till ett system av linjära ekvationer med detaljerade förklaringar.
Ett system av m linjära ekvationer med n okända kallas ett formsystem
Var en ij Och b i (i=1,…,m; b=1,…,n) är några kända nummer, och x 1,...,x n- okänd. Vid beteckningen av koefficienter en ij första index i betecknar ekvationsnumret och det andra j– numret på det okända som denna koefficient står för.
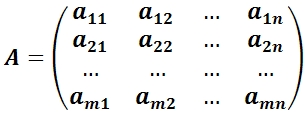
Vi kommer att skriva koefficienterna för de okända i form av en matris  , som vi kallar systemets matris.
, som vi kallar systemets matris.
Siffrorna på höger sida av ekvationerna är b 1,...,b m kallas gratis medlemmar.
Helhet n tal c 1,...,c n kallad beslut av ett givet system, om varje ekvation i systemet blir en likhet efter att ha ersatt siffror i den c 1,...,c n istället för motsvarande okända x 1,...,x n.
Vår uppgift blir att hitta lösningar på systemet. I det här fallet kan tre situationer uppstå:
Ett system av linjära ekvationer som har minst en lösning kallas gemensam. Annars, dvs. om systemet inte har några lösningar, då kallas det icke-fogad.
Låt oss överväga sätt att hitta lösningar på systemet.
MATRIXMETOD FÖR LÖSNING AV SYSTEM AV LINJÄRA EKVATIONER
Matriser gör det möjligt att kortfattat skriva ner ett system av linjära ekvationer. Låt ett system med 3 ekvationer med tre okända ges:

Tänk på systemmatrisen  och matriskolumner med okända och fria termer
och matriskolumner med okända och fria termer 
Låt oss hitta jobbet
de där. som ett resultat av produkten får vi den vänstra sidan av ekvationerna i detta system. Sedan, med hjälp av definitionen av matrisjämlikhet, kan detta system skrivas i formen
 eller kortare A∙X=B.
eller kortare A∙X=B.
Här är matriserna A Och Bär kända, och matrisen X okänd. Det är nödvändigt att hitta det, för... dess delar är lösningen på detta system. Denna ekvation kallas matrisekvation.
Låt matrisens determinant vara skild från noll | A| ≠ 0. Då löses matrisekvationen enligt följande. Multiplicera båda sidor av ekvationen till vänster med matrisen A-1, invers av matrisen A: . Eftersom den A -1 A = E Och E∙X = X, då får vi en lösning på matrisekvationen i formen X = A -1 B .
Observera att eftersom den inversa matrisen endast kan hittas för kvadratiska matriser, då kan matrismetoden bara lösa de system där antalet ekvationer sammanfaller med antalet okända. Men matrisregistrering av systemet är också möjligt i det fall då antalet ekvationer inte är lika med antalet okända, då matrisen A kommer inte att vara fyrkantig och därför är det omöjligt att hitta en lösning på systemet i formuläret X = A -1 B.
Exempel. Lösa ekvationssystem.

CRAMERS REGEL
Betrakta ett system med 3 linjära ekvationer med tre okända:
Tredje ordningens determinant som motsvarar systemmatrisen, dvs. består av koefficienter för okända,
kallad systemets avgörande.
Låt oss komponera ytterligare tre determinanter enligt följande: ersätt sekventiellt 1, 2 och 3 kolumner i determinanten D med en kolumn med fria termer

Då kan vi bevisa följande resultat.
Teorem (Cramers regel). Om determinanten för systemet Δ ≠ 0, så har det aktuella systemet en och endast en lösning, och
![]()
Bevis. Så låt oss betrakta ett system med 3 ekvationer med tre okända. Låt oss multiplicera den första ekvationen i systemet med det algebraiska komplementet A 11 element en 11, 2:a ekvationen – på A 21 och 3:a – på A 31:
Låt oss lägga till dessa ekvationer:
Låt oss titta på var och en av parenteserna och den högra sidan av denna ekvation. Genom satsen om expansionen av determinanten i element i den första kolumnen
På samma sätt kan det visas att och .
Slutligen är det lätt att märka det 
Därmed får vi jämställdheten: .
Därav, .
Likheterna och härleds på liknande sätt, varav satsens uttalande följer.
Således noterar vi att om determinanten för systemet Δ ≠ 0, så har systemet en unik lösning och vice versa. Om systemets avgörande lika med noll, då har systemet antingen ett oändligt antal lösningar eller har inga lösningar, d.v.s. oförenlig.
Exempel. Lös ekvationssystem

GAUSS METOD
De tidigare diskuterade metoderna kan användas för att lösa endast de system där antalet ekvationer sammanfaller med antalet okända, och systemets determinant måste skilja sig från noll. Gauss-metoden är mer universell och lämplig för system med hur många ekvationer som helst. Den består i en konsekvent eliminering av okända från systemets ekvationer.
Överväg igen systemet från tre ekvationer med tre okända:
 .
.
Vi lämnar den första ekvationen oförändrad, och från den 2:a och 3:e utesluter vi termerna som innehåller x 1. För att göra detta, dividera den andra ekvationen med A 21 och multiplicera med – A 11, och lägg sedan till den i den första ekvationen. På samma sätt dividerar vi den tredje ekvationen med A 31 och multiplicera med – A 11, och lägg sedan till den med den första. Som ett resultat kommer det ursprungliga systemet att ta formen:

Nu från den sista ekvationen eliminerar vi termen som innehåller x 2. För att göra detta, dividera den tredje ekvationen med, multiplicera med och addera med den andra. Då får vi ett ekvationssystem:
Härifrån, från den sista ekvationen är det lätt att hitta x 3, sedan från den 2:a ekvationen x 2 och slutligen, från 1:a - x 1.
När man använder Gaussmetoden kan ekvationerna bytas om det behövs.
Ofta, istället för att skriva ett nytt ekvationssystem, begränsar de sig själva till att skriva ut systemets utökade matris:
och sedan föra den till en triangulär eller diagonal form med hjälp av elementära transformationer.
TILL elementära transformationer matriser inkluderar följande transformationer:
- omarrangera rader eller kolumner;
- multiplicera en sträng med ett annat tal än noll;
- lägga till andra rader på en rad.
Exempel: Lös ekvationssystem med Gauss-metoden.

Således har systemet ett oändligt antal lösningar.
- System m linjära ekvationer med n okänd.
Lösa ett system av linjära ekvationer- det här är en sådan uppsättning siffror ( x 1, x 2, …, x n), när den substitueras i var och en av systemets ekvationer, erhålls den korrekta likheten.
Var aij, i = 1, …, m; j = 1, …, n— Systemkoefficienter.
bi, i = 1, …, m- gratis medlemmar;
x j, j = 1, …, n- okänd.
Ovanstående system kan skrivas i matrisform: A X = B,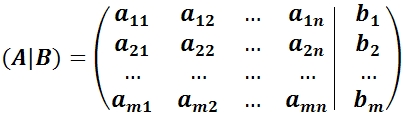

Var ( A|B) är systemets huvudmatris;
A— utökad systemmatris.
X— kolumn av okända;
B— kolumn med fria medlemmar.
Om matris Bär inte en nollmatris ∅, då kallas detta linjära ekvationssystem inhomogent.
Om matris B= ∅, då kallas detta linjära ekvationssystem homogent. Homogent system har alltid en noll (trivial) lösning: x 1 = x 2 = …, x n = 0.
Ledsystem av linjära ekvationerär ett system av linjära ekvationer som har en lösning.
Inkonsekvent system av linjära ekvationerär ett olösligt system av linjära ekvationer.
Ett visst system av linjära ekvationerär ett system av linjära ekvationer som har en unik lösning.
Obestämt system av linjära ekvationerär ett system av linjära ekvationer med ett oändligt antal lösningar. - System med n linjära ekvationer med n okända
Om antalet okända är lika med antalet ekvationer, är matrisen kvadratisk. Determinanten för en matris kallas huvuddeterminanten för ett system av linjära ekvationer och betecknas med symbolen Δ.
Cramer metod för att lösa system n linjära ekvationer med n okänd.
Cramers regel.
Om huvuddeterminanten för ett system med linjära ekvationer inte är lika med noll, är systemet konsekvent och definierat, och den enda lösningen beräknas med Cramer-formlerna:
där Δ i är determinanter erhållna från huvuddeterminanten i systemet Δ genom att ersätta i kolumnen till kolumnen med fria medlemmar. . - System av m linjära ekvationer med n okända
Kronecker-Capelli-satsen.
För att ett givet system av linjära ekvationer ska vara konsekvent är det nödvändigt och tillräckligt att rangordningen för systemmatrisen är lika med rangordningen för systemets utökade matris, rang(Α) = rang(Α|B).
Om rang(Α) ≠ rang(Α|B), då har systemet uppenbarligen inga lösningar.
Om rang(Α) = rang(Α|B), då är två fall möjliga:
1) rank(Α) = n(antal okända) - lösningen är unik och kan erhållas med Cramers formler;
2) rang(Α)< n – det finns oändligt många lösningar. - Gauss metod för att lösa linjära ekvationssystem
Låt oss skapa en utökad matris ( A|B) för ett givet system från koefficienterna för de okända och högra sidorna.
Gaussmetoden eller metoden att eliminera okända består av att reducera den utökade matrisen ( A|B) med hjälp av elementära transformationer över dess rader till en diagonal form (till en övre triangulär form). Återgå till ekvationssystemet, alla okända bestäms.
Elementära transformationer över strängar inkluderar följande:
1) byta två linjer;
2) multiplicera en sträng med ett annat tal än 0;
3) lägga till ytterligare en sträng till en sträng, multiplicerad med ett godtyckligt tal;
4) kasta ut en nolllinje.
En utökad matris reducerad till diagonal form motsvarar ett linjärt system ekvivalent med det givna, vars lösning inte orsakar svårigheter. . - System av homogena linjära ekvationer.
Ett homogent system har formen:
den motsvarar matrisekvationen A X = 0.
1) Ett homogent system är alltid konsekvent, eftersom r(A) = r(A|B), det finns alltid en nolllösning (0, 0, …, 0).
2) För att ett homogent system ska ha en lösning som inte är noll är det nödvändigt och tillräckligt att r = r(A)< n , vilket är ekvivalent med Δ = 0.
3) Om r< n , då uppenbarligen Δ = 0, då uppstår fria okända c1, c2, …, c n-r, systemet har icke-triviala lösningar, och det finns oändligt många av dem.
4) Allmän lösning X på r< n kan skrivas i matrisform enligt följande:
X = c 1 X 1 + c 2 X 2 + … + c n-r X n-r,
var finns lösningarna X 1, X 2, …, X n-r bilda ett grundläggande system av lösningar.
5) Det grundläggande lösningssystemet kan erhållas från den allmänna lösningen av ett homogent system: ,
,
om vi sekventiellt sätter parametervärdena lika med (1, 0, …, 0), (0, 1, …, 0), …, (0, 0, …, 1).
Utvidgning av den allmänna lösningen i termer av det grundläggande lösningssystemetär en inspelning av den allmänna lösningen i formuläret Linjär kombination lösningar som hör till det grundläggande systemet.
Sats. För att ett system med linjära homogena ekvationer ska ha en lösning som inte är noll, är det nödvändigt och tillräckligt att Δ ≠ 0.
Så, om determinanten Δ ≠ 0, så har systemet en unik lösning.
Om Δ ≠ 0, så har systemet med linjära homogena ekvationer ett oändligt antal lösningar.
Sats. För att ett homogent system ska ha en lösning som inte är noll är det nödvändigt och tillräckligt att r(A)< n .
Bevis:
1) r det kan inte bli mer n(matrisens rang överstiger inte antalet kolumner eller rader);
2) r< n , därför att Om r = n, då huvuddeterminanten för systemet Δ ≠ 0, och enligt Cramers formler finns det en unik trivial lösning x 1 = x 2 = … = x n = 0, vilket strider mot villkoret. Betyder att, r(A)< n .
Följd. För att få ett homogent system n linjära ekvationer med n okända hade en lösning som inte var noll, det är nödvändigt och tillräckligt att Δ = 0.
Lösning av linjära system algebraiska ekvationerär en av huvuduppgifterna linjär algebra. Detta problem har en viktig tillämpad betydelse för att lösa vetenskapliga och tekniska problem, dessutom är det hjälpmedel vid implementeringen av många algoritmer inom beräkningsmatematik, matematisk fysik och bearbetning av resultat av experimentell forskning.
Ett system av linjära algebraiska ekvationer kallas ett ekvationssystem av formen: (1)
Var – okänd; - gratis medlemmar.
Lösa ett ekvationssystem(1) ring vilken uppsättning nummer som helst som, när de placeras i system (1) i stället för de okända omvandlar alla ekvationer i systemet till korrekta numeriska likheter.
Ekvationssystemet kallas gemensam, om den har minst en lösning, och icke-fogad, om det inte har några lösningar.
Det samtidiga ekvationssystemet kallas vissa, om den har en unik lösning, och osäker, om den har minst två olika lösningar.
De två ekvationssystemen kallas likvärdig eller likvärdig, om de har samma uppsättning lösningar.
System (1) anropas homogen, om de fria villkoren är noll:
Ett homogent system är alltid konsekvent - det har en lösning (kanske inte den enda).
Om i system (1), så har vi systemet n linjära ekvationer med n okänt: var – okänd; – koefficienter för okända, - gratis medlemmar.
Linjärt system kan ha en enda lösning, oändligt många lösningar eller ingen lösning alls.
Betrakta ett system av två linjära ekvationer med två okända
Om då systemet har en unik lösning;
om då systemet inte har några lösningar;
om då systemet har ett oändligt antal lösningar.
Exempel. Systemet har en unik lösning på ett par nummer
Systemet har ett oändligt antal lösningar. Till exempel är lösningar till ett givet system siffror, etc.
Systemet har inga lösningar, eftersom skillnaden mellan två tal inte kan ta två olika värden.
Definition. Andra ordningens determinant kallas ett uttryck för formen:
Determinanten betecknas med symbolen D.
Tal A 11, …, A 22 kallas element av determinanten.
Diagonal bildad av element A 11 ; A 22 kallas huvud diagonal bildad av element A 12 ; A 21 − sida
Således är andra ordningens determinant lika med skillnaden mellan produkterna av elementen i huvud- och sekundärdiagonalerna.
Observera att svaret är en siffra.
Exempel. Låt oss beräkna determinanterna:
Betrakta ett system av två linjära ekvationer med två okända: var X 1, X 2 – okänd; A 11 , …, A 22 – koefficienter för okända, b 1 ,b 2 – gratis medlemmar.
Om ett system med två ekvationer med två okända har en unik lösning, kan den hittas med andra ordningens determinanter.
Definition. En determinant som består av koefficienter för okända kallas systemdeterminant: D= .
Kolumnerna för determinanten D innehåller koefficienterna för respektive X 1 och kl , X 2. Låt oss presentera två ytterligare kval, som erhålls från systemets determinant genom att ersätta en av kolumnerna med en kolumn med fria termer: D 1 = D 2 = .
Sats 14(Kramer, för fallet n=2). Om determinanten D för systemet skiljer sig från noll (D¹0), så har systemet en unik lösning, som hittas med hjälp av formlerna:
Dessa formler kallas Cramers formler.
Exempel. Låt oss lösa systemet med Cramers regel:
Lösning. Låt oss hitta siffrorna
Svar.
Definition. Tredje ordningens determinant kallas ett uttryck för formen:
Element A 11; A 22 ; A 33 – bildar huvuddiagonalen.
Tal A 13; A 22 ; A 31 – bildar en sidodiagonal.
Posten med ett plus inkluderar: produkten av element på huvuddiagonalen, de återstående två termerna är produkten av element som är placerade vid trianglarnas hörn med baser parallella med huvuddiagonalen. Minustermerna bildas enligt samma schema med avseende på den sekundära diagonalen.
Exempel. Låt oss beräkna determinanterna:
Betrakta ett system med tre linjära ekvationer med tre okända: var – okänd; – koefficienter för okända, - gratis medlemmar.
I fallet med en unik lösning kan ett system med 3 linjära ekvationer med tre okända lösas med hjälp av 3:e ordningens determinanter.
Determinanten för system D har formen:
Låt oss introducera ytterligare tre determinanter:
Sats 15(Kramer, för fallet n=3). Om determinanten D för systemet skiljer sig från noll, har systemet en unik lösning, som hittas med hjälp av Cramers formler:
Exempel. Låt oss lösa systemet med Cramers regel.
Lösning. Låt oss hitta siffrorna
Låt oss använda Cramers formler och hitta lösningen på det ursprungliga systemet:
Svar.
Observera att Cramers sats är tillämplig när antalet ekvationer är lika med antalet okända och när determinanten för systemet D är icke-noll.
Om systemets determinant är lika med noll, så kan systemet i detta fall antingen ha inga lösningar eller ha ett oändligt antal lösningar. Dessa fall studeras separat.
Låt oss bara notera ett fall. Om systemets determinant är lika med noll (D=0), och åtminstone en av de ytterligare determinanterna skiljer sig från noll, så har systemet inga lösningar, det vill säga det är inkonsekvent.
Cramers teorem kan generaliseras till systemet n linjära ekvationer med n okänt: var – okänd; – koefficienter för okända, - gratis medlemmar.
Om determinanten för ett system av linjära ekvationer med okända, så hittas den enda lösningen till systemet med Cramers formler:
En ytterligare determinant erhålls från determinanten D om den innehåller en kolumn med koefficienter för det okända x i ersätt med en kolumn med gratis medlemmar.
Observera att determinanterna D, D 1 , … , D n ha ordning n.
Gauss metod för att lösa linjära ekvationssystem
En av de vanligaste metoderna för att lösa system av linjära algebraiska ekvationer är metoden för sekventiell eliminering av okända −Gauss-metoden. Denna metod är en generalisering av substitutionsmetoden och består av att sekventiellt eliminera okända tills en ekvation med en okänd återstår.
Metoden bygger på några transformationer av ett system av linjära ekvationer, vilket resulterar i ett system ekvivalent med det ursprungliga systemet. Metodalgoritmen består av två steg.
Det första steget kallas rakt fram Gauss metod. Det består av att sekventiellt eliminera okända från ekvationer. För att göra detta, i det första steget, dividera den första ekvationen av systemet med (annars ordna om systemets ekvationer). De betecknar koefficienterna för den resulterande reducerade ekvationen, multiplicerar den med koefficienten och subtraherar den från systemets andra ekvation, vilket eliminerar den från den andra ekvationen (nollställ koefficienten).
Gör samma sak med de återstående ekvationerna och skaffa ett nytt system, i alla ekvationer som, från och med den andra, koefficienterna för endast innehåller nollor. Uppenbarligen kommer det resulterande nya systemet att vara likvärdigt med det ursprungliga systemet.
Om de nya koefficienterna, för , inte alla är lika med noll, kan de uteslutas på samma sätt från den tredje och efterföljande ekvationerna. Om du fortsätter med denna operation för följande okända, förs systemet till den så kallade triangulära formen:
Här anger symbolerna de numeriska koefficienter och fria termer som har förändrats till följd av transformationer.
Från den sista ekvationen i systemet det enda sättet bestämma och sedan, genom sekventiell substitution, bestämma de återstående okända.
Kommentar. Ibland, som ett resultat av transformationer, i någon av ekvationerna blir alla koefficienter och den högra sidan noll, det vill säga att ekvationen förvandlas till identiteten 0=0. Genom att eliminera en sådan ekvation från systemet reduceras antalet ekvationer jämfört med antalet okända. Ett sådant system kan inte ha en enda lösning.
Om en ekvation i processen att tillämpa Gauss-metoden blir en likhet med formen 0 = 1 (koefficienterna för de okända blir 0, och den högra sidan får ett värde som inte är noll), då originalsystemet har ingen lösning, eftersom en sådan likhet är falsk för alla okända värden.
Betrakta ett system med tre linjära ekvationer med tre okända:
Var – okänd; – koefficienter för okända, - gratis medlemmar. , ersätter det som hittades
Lösning. Genom att tillämpa den Gaussiska metoden på detta system får vi
Var misslyckas den sista jämlikheten för några värden av de okända, därför har systemet ingen lösning.
Svar. Systemet har inga lösningar.
Observera att den tidigare diskuterade Cramer-metoden kan användas för att lösa endast de system där antalet ekvationer sammanfaller med antalet okända, och systemets determinant måste vara icke-noll. Gauss-metoden är mer universell och lämplig för system med hur många ekvationer som helst.
Liknande artiklar



